Thousands of construction projects around the world involve building infrastructure in shallow coastal areas. Some support aquaculture and offshore wind energy projects, while others erect seawalls to prevent coastal erosion.
They are expensive endeavors in a harsh environment constantly rocked by waves and swells. With that in mind, Dartmouth researchers are taking the first steps towards creating robots that can dive in and do the heavy lifting.
“Underwater construction adds constraints that robots and drones operating on land don’t deal with,” says Samuel Lensgraf, a computer science PhD student at the Guarini School of Graduate and Advanced Studies. “Waves and silt make it impossible to have precise control or a clear view of the operating area.”
Lensgraf, working with computer science professors Alberto Quattrini Li and Devin Balkcom, set out to design a construction process that can absorb some of the errors caused by the difficult environment.
One method is to insert custom-made cones through holes in store-bought concrete building blocks. The next layer of blocks slide into place over these cones. This interlocking system ensures that the blocks can be stacked precisely even if they are buffeted by waves as they are set down.
The aquatic robot to work with such a system was designed from scratch. Lensgraf, who was a web developer before joining the Reality and Robotics Lab, was interested in construction and fabrication but had no experience building mobile robots. “I did most of the fabrication and engineering; it was really a lot of fun to learn how to do,” he says.
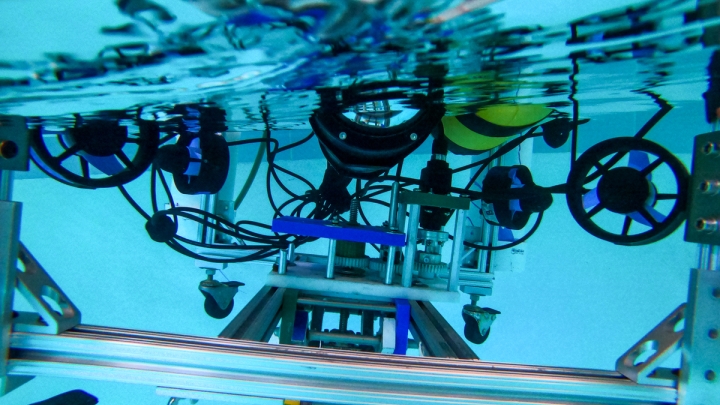
Their prototype, which they have tested in a 13-foot-deep swimming pool, can build structures using 12 components and weighing more than 200 pounds.

At the robot’s core is a claw-like manipulator which draws design inspiration from stone grabbers of yore and exploit the weight of objects they latch onto to tighten their grasp. But if the robot relied solely on battery power to lift and transport the blocks, which weigh up to 20 pounds apiece, it would run out of juice after laying just a few.
“Our robot uses two sources of power—a battery as well as a buoyancy boost from compressed air,” says Quattrini Li, an assistant professor of computer science. A scuba tank releases pressurized air into four cylindrical chambers that encircle the robot. As the chambers fill with air, they lift the robot, and its load, up.
“This is similar to how scuba diving works,” Quattrini Li says. “By using buoyancy, you can make the robot lighter while it’s carrying heavy things in the water.”
Lensgraf also devised an algorithm that determines how much air is used for each task—lifting, moving, and releasing—in order to achieve the most effective use of both energy sources and maximize the number of blocks that can be picked up and placed.
“This is the first construction robot that’s using buoyancy to help it move things,” says Lensgraf, who will present his work at the 2023 IEEE International Conference on Robotics and Automation in May.
While this is an important first step, work remains to be done before the robots will be ready to take the plunge into the ocean for field tests, says Lensgraf, who is already working on upgrades.